modname=ckeditor
Šis ryšys yra variklio kūrimo rinkinys, pristatymo laikas 1-3 vienetai yra 5-7 dienas, prašome susisiekti su savininku prieš šaudymo daugiau nei 3 vienetus, ačiū
Gali teikti paslaugą siųsti sąskaitą faktūrą pirma, ir tada laivybos gavusi viešųjų lėšų (15% deposit required)
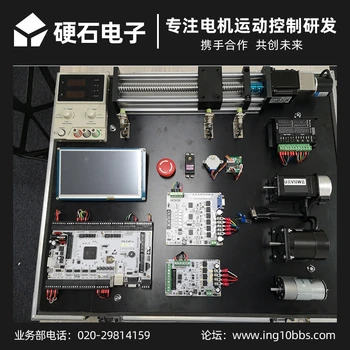
Produkto Modelis: Hard Rock Motorinių Eksperimento Dėžutę
YMD1020
( YSMODOT1127 )
Svoris: 24.2 KG
Tūris: 65*55*28CM
1) Linijinis vadovas varžtas stumdomas stalas: veiksminga ilgis 200 mm, tikslumas 0,1 mm, aliuminio lydinio konstrukcija;
2) Stepper uždarosios kilpos variklis: 57 žingsninių variklių, 1.2 N. m sukimo momentas, 1000 linija AB " etapo encoder;
3) Stepper motor driver: didžiausias laivas 32, ir maksimali srovė 3A;
4) Šepečiu nuolatinės SROVĖS pavara variklis: 100-linija AB " tipo kodavimo, 1:30 mažinimo koeficientas, nominalus sukimo momentas 5.5 KG/CM;
5) Šepečiu DC pavara valdyba: parama 12-60V 10A brushed varikliu ratai, dabartinis atliekų surinkimo tikslumas gali siekti 20MA lygiu;
6) BLDC brushless DC variklis: 2500RPM nominali greitis, nominalus sukimo momentas 0.38 NM, su Salėje grįžtamojo ryšio signalas;
7) Nuolatinis magnetas sinchroninio variklio PMSM: 1000 linija ABZ etapas encoder produkcija, 2500RPM nominali greitis, Salė su grįžtamojo ryšio signalas;
8) Brushless/nuolatinis magnetas ratai valdyba: parama kvadratinių bangų/SPWM/SVPWM ratai, trys-atsparumas atrankos etapo srovė, remti 18-60V 10A brushless struktūra pavara;
9) 7 colių serijos ekranas: parama konfigūracija plėtros, nuosekliojo ryšio kontrolės, stiprus anti-trukdžių;
10) STM32F4 kontrolės valdyba: ateina su tinklas, nuoseklusis prievadas, 232, 485, GALI ryšio sąsaja, ištekliai patenkinti reikalavimą iš daugiau nei 12 PWM kanalus tuo pačiu metu, borto 28 kanalų izoliuotas optocoupler IO;
11) DC stabilizuotas maitinimo šaltinis: linijinis maitinimo, 0-30 V 0-5A įmontuotu trumpojo jungimo elektros tiekimo, įtampos ribojimo ir srovės ribojimas operacija.
12) platforma palaiko internete derinimo PID, FOC dinaminis peržiūrėti ir pagrindiniame kompiuteryje imituoja pramonės automatizavimo veiksmų operacijas.
Derinimo algoritmas:
Pateikti stepper motorinių tiesinio interpoliavimo algoritmas, diskiniai interpoliavimo algoritmas, S-formos greitėjimo ir lėtėjimo algoritmas.
1. Žingsninis variklis T tipo greitėjimo ir lėtėjimo, S tipo greitėjimo ir lėtėjimo, PID greitis/pozicija vienos/dviejų uždarosios kilpos derinimo;
2. DC teptuku variklio greitėjimo/lėtėjimo, vieno/dviejų/trijų uždarosios kilpos derinimo greičio matavimo/dabartinė/padėtis, sukimo momento matavimo režimas
pabandykite;
3. Brushless DC motor kvadratinių bangų ratai, greičio uždarosios kilpos derinimo, FOC greitis dabartinės dvigubai uždaro ciklo vektorius signalo koregavimas
pabandykite;
4. Nuolatinis magnetas sinchroniniais varikliais buvo kvadratinės bangos greitis uždarosios kilpos, aikštėje banga poziciją uždarosios kilpos derinimo, SPWM/SVPWM vektoriaus open loop
Signalo modeliavimas; FOC greitis/pozicija/dabartinis vieno/dviejų/trijų uždarosios kilpos derinimo, Id, Iq, WR kompiuterio vaizdą,
Servo sistemos ryšio viršutinės ir apatinės kompiuterio šaltinį kodas gyvenimą.
5. CANopen/Modubus RTU/Modubus TCP/DMA serial port/SPI/IIC ir kitų pramonės protokolo mokslinių tyrimų ir plėtros
įprotis.









 Panašių
Panašių

 Panašių
Panašių

 Panašių
Panašių

 Panašių
Panašių

 Panašių
Panašių

 Panašių
Panašių


 Panašių
Panašių

 Panašių
Panašių